


 Ọdịnihu nke ịwa ahụ Robotic: Sistemụ ịwa ahụ Robotic dị ịtụnanya
Ọdịnihu nke ịwa ahụ Robotic: Sistemụ ịwa ahụ Robotic dị ịtụnanya
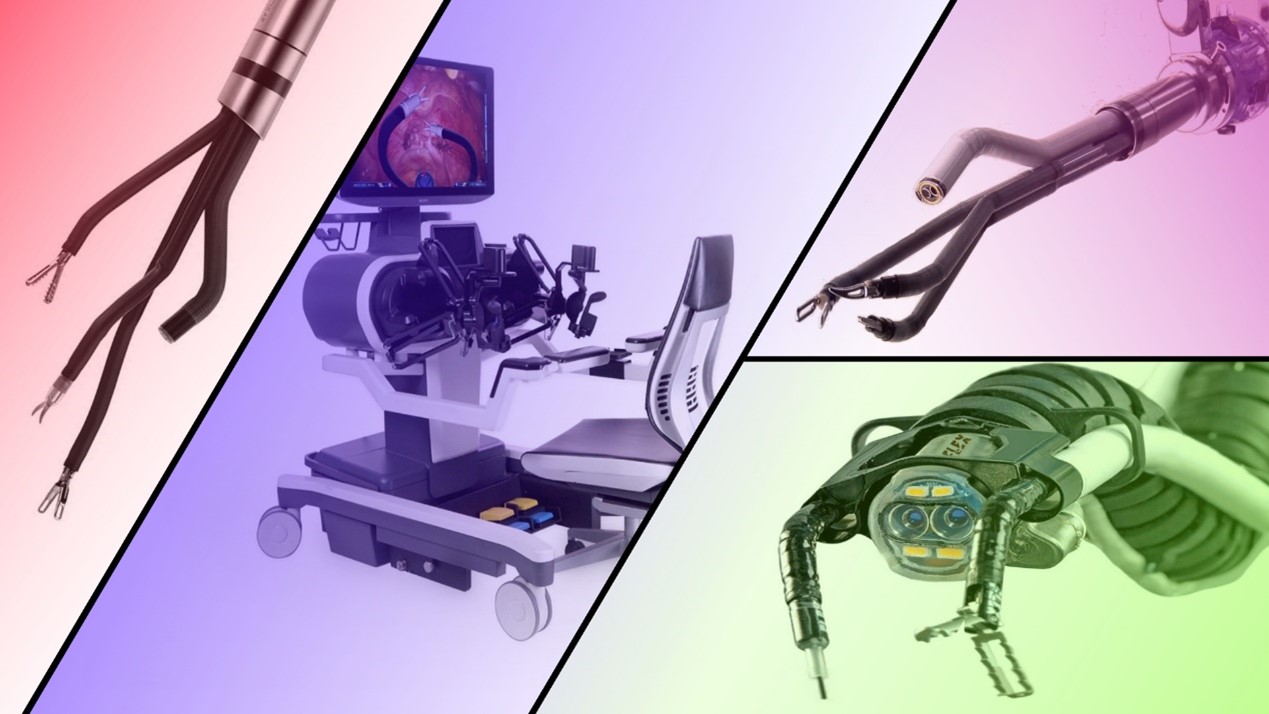
Sistemụ ịwa ahụ Robotic kachasị elu n'ụwa
Ịwa ahụ Robotic
Roboticịwa ahụbụ ụdị ịwa ahụ ebe dọkịta na-arụ onye ọrịa ahụ site na ịchịkwa ogwe aka nkeusoro roboti. Ogwe aka rọbọt ndị a na-eṅomi aka dọkịta na-awa ahụ wee gbadaa mmegharị ahụ, yabụ na-enye onye dọkịta na-awa ahụ ohere igbubi nke ọma na nke nta.
Ịwa ahụ robotic abụrụla nzọụkwụ mgbanwe n'ịkwalite usoro ịwa ahụ ka ọ na-eme ka ịwa ahụ dịkwuo mma site na nhazi nke ọma, nkwụsi ike, na dexterity.
Kemgbe ewebata sistemu ịwa ahụ da Vinci na 1999, enwetala ịwa ahụ siri ike karịa n'ihi nhụhụhụ anya 3-D ka mma, ogo nnwere onwe 7, yana nhụsianya izizi na ịnweta ịwa ahụ. Ndị nchịkwa nri na ọgwụ ọjọọ nke US (FDA) kwadoro da Vinci Surgical System na 2000, na ọgbọ anọ nke usoro a ka ewebatala n'ime afọ 21 gara aga.
Ihe ịrụ ụka adịghị ya na Pọtụfoliyo akụ ọgụgụ isi nke Intuitive Surgical ekerewo òkè dị ukwuu n'inyere ụlọ ọrụ ahụ aka iru na ịnọgide na-enwe ọnọdụ ya kachasị n'ahịa ịwa ahụ robot; o tinyela ogbunigwe nke mkpuchi patent nke ndị nwere ike ịsọ mpi ga-eche ihu mgbe ha na-enyocha ụzọ ịbanye ahịa.
N'ime afọ iri abụọ gara aga, ndịSistemụ ịwa ahụ Vinciabụrụla sistemu ịwa ahụ nke rọbọt nke nwere ntọala arụnyere ihe karịrị nkeji 4000 n'ụwa niile. Nke a ahịa òkè e ji mee ihe karịrị 1.5 nde usoro ịwa ahụ na ubi nkegynecology, urology, naizugbe ịwa ahụ.
Sistemụ ịwa ahụ da Vinci bụ azụmaahịa dịsistemu roboti ịwa ahụsite na nkwado FDA, mana ikike ikike ikike ọgụgụ isi mbụ ha ga-agwụ n'oge na-adịghị anya ma sistemụ asọmpi na-abịaru nso ịbanye n'ahịa.
N'afọ 2016, patent nke Vinci maka ogwe aka na ngwaọrụ roboti a na-achịkwa na arụrụ ọrụ onyonyo nke robot ịwa ahụ agwụla. Na ọtụtụ ikike ịwa ahụ Intuitive kubie ume na 2019.
Ọdịnihu nke Sistemụ ịwa ahụ Robotic
Nkeọdịnihu nke sistemu ịwa ahụ robotidabere n'ọganihu na teknụzụ dị ugbu a yana mmepe nke nkwalite ọhụrụ dị iche iche.
Ihe ọhụrụ ndị dị otú ahụ, ụfọdụ n'ime ha ka nọ na nnwale nnwale, gụnyereminiaturizationogwe aka robotic,echiche ziri ezinanzaghachi haptic, ọhụrụ ụzọ maka anụ ahụ approximation na hemostasis, mgbanwe aro nke roboti ngwá, mmejuputa atumatu nke eke orifice transluminal endoscopic ịwa ahụ (NOTES) echiche, mwekota nke igodo usoro site augmented-eziokwu ngwa na, n'ikpeazụ, kwụụrụ onwe robotic actuation.
Ọtụtụusoro ịwa ahụ nke robotike mepụtala, a na-emekwa nnwale ụlọ ọgwụ na mba dị iche iche. A na-emewanyewanye teknụzụ ọhụrụ iji melite ikike nke sistemu arụpụtara na mbụ yana ergonomics ịwa ahụ.
Ka teknụzụ na-etolite ma na-agbasa, ọnụ ahịa ya ga-adịkwu ọnụ ala, a ga-ewepụtakwa ịwa ahụ roboti n'ụwa niile. N'ime oge roboti a, anyị ga-ahụ asọmpi siri ike ka ụlọ ọrụ na-aga n'ihu na-emepụta ma na-ere ngwaọrụ ọhụrụ.
Oge nzipu: Eprel-28-2022